前回の続きです。
[SunFounder]SunFounder Model Car kit Video Camera for Raspberry Pi 3/2/B /B RC Servo Motor Remote Control Roboticsをベースに自律型の自動運転ラジコンカーを自作しています。
→材料に関してはこちらをご覧ください。
今回は前輪を設置します。
これから細かい作業が続くので集中力が大事です。
付属のドライバーはマグネット式なので、細かいネジでも比較的容易に締めることができます。
シャーシとの接続部分を作ります。方向舵のキーとなります。
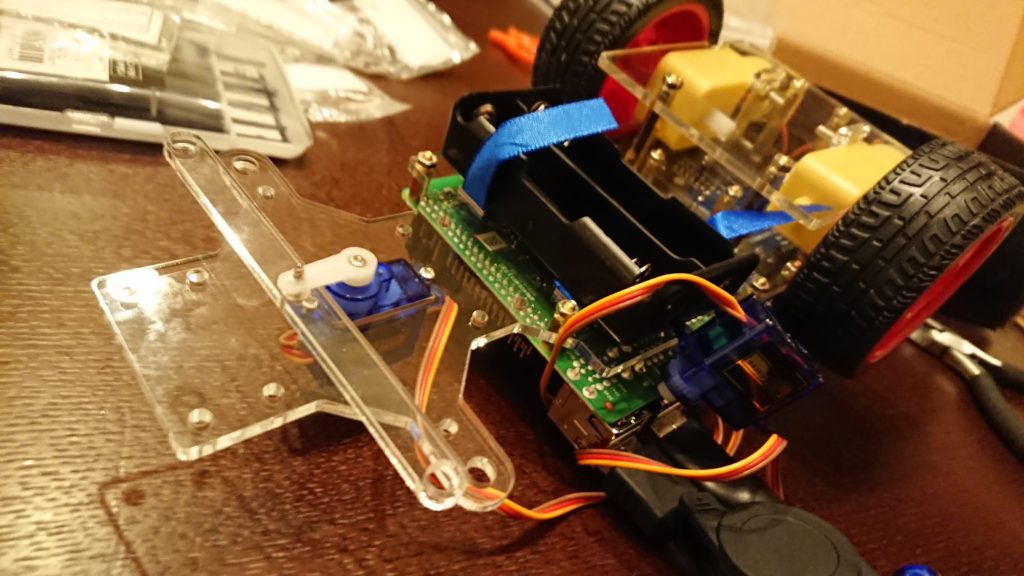
シャーシとの接続完了。
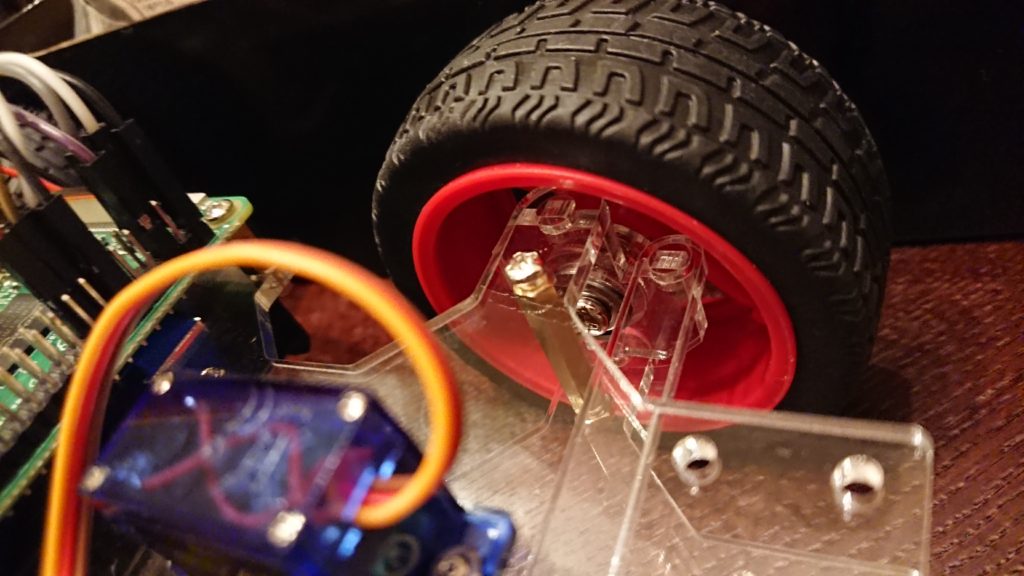
続いて前輪を接続。細かい作業だったので、途中経過の写真を撮る余裕がありませんでした(笑)
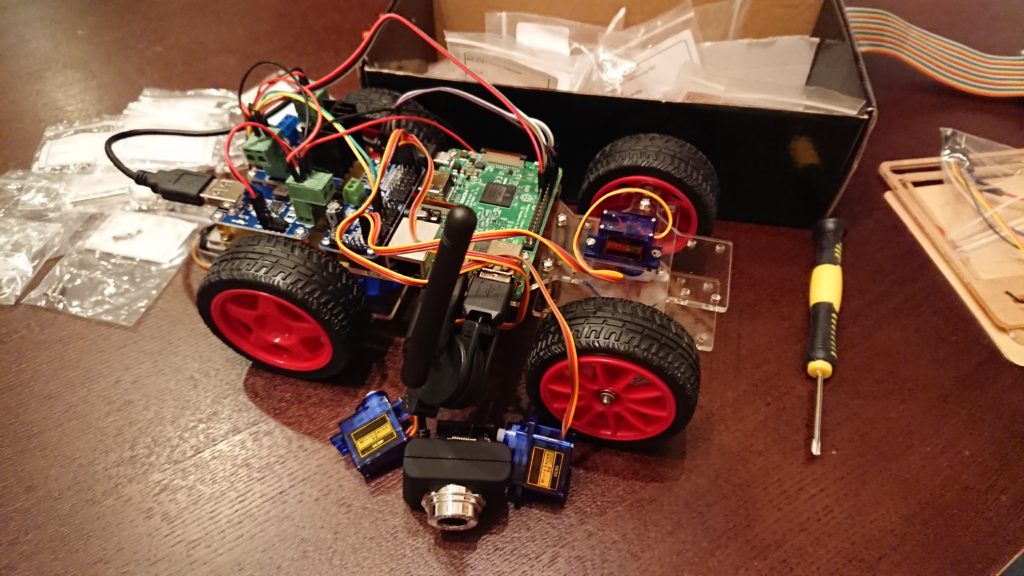
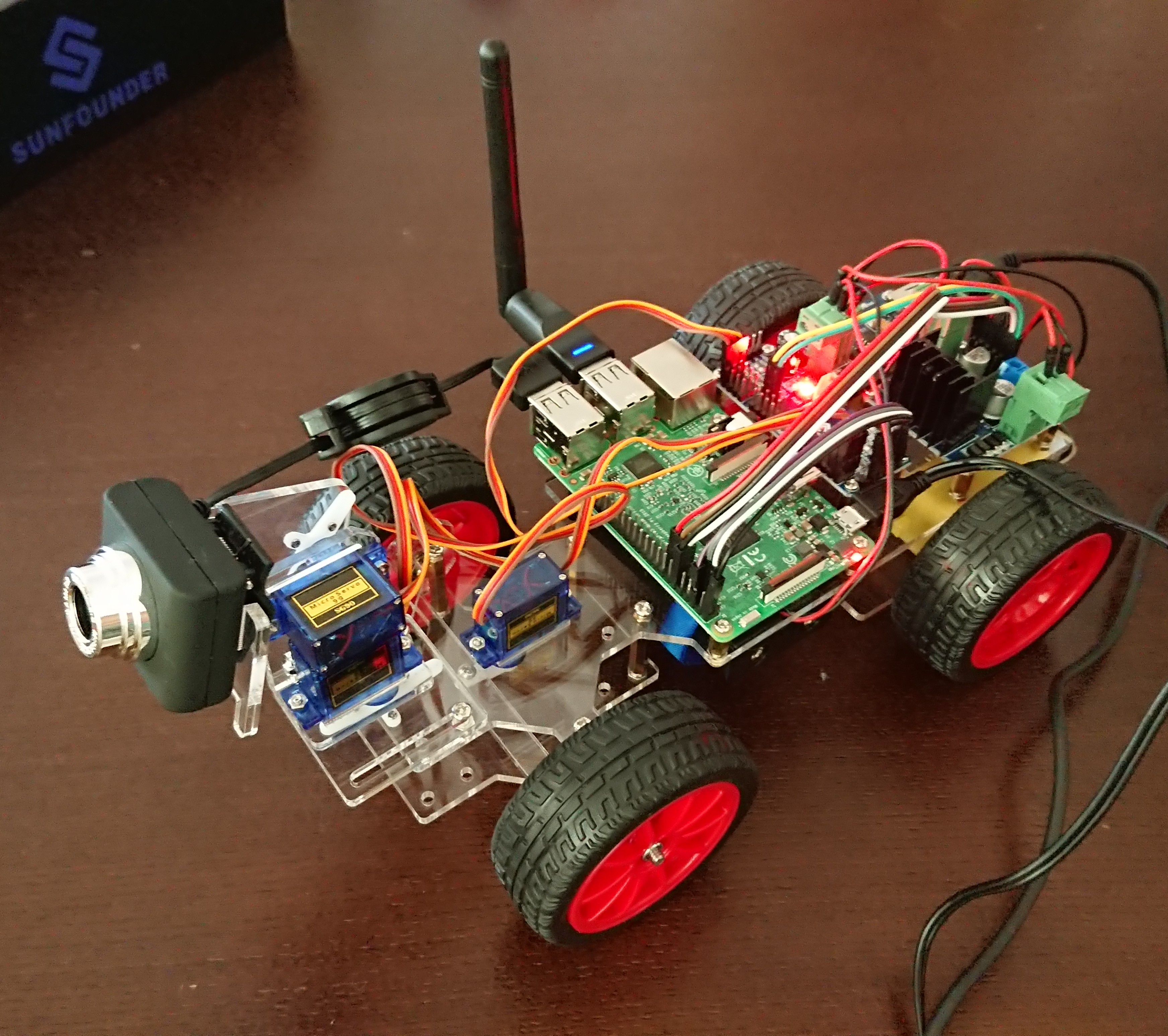
前輪設置完了。四輪が揃い、ようやく車らしくなりました!
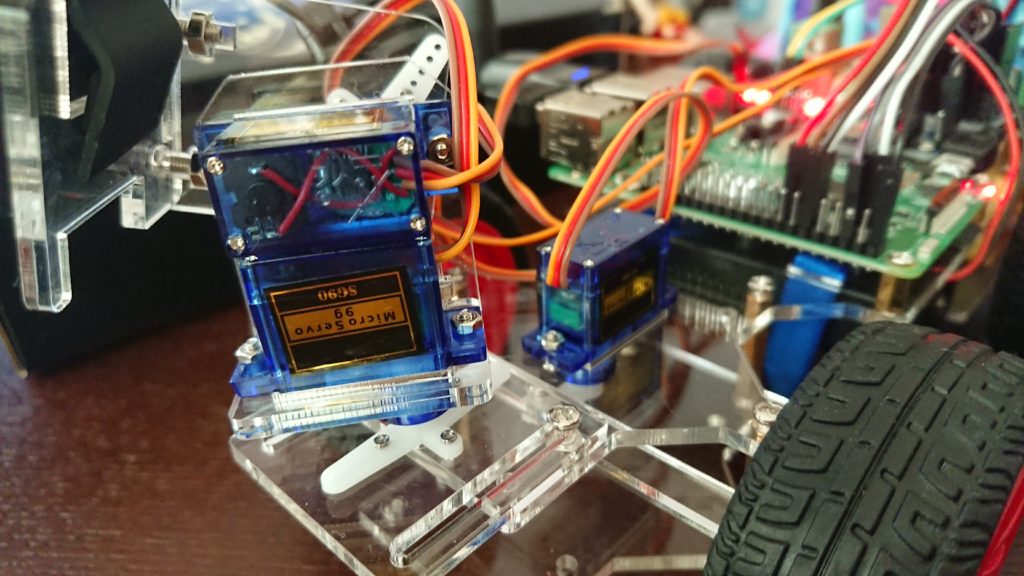
前回設置済みの3つのTower Pro Micro Servo SG90(回転の回数や回転角度などを指定し制御できる特殊なモータ)をそれぞれ装着。
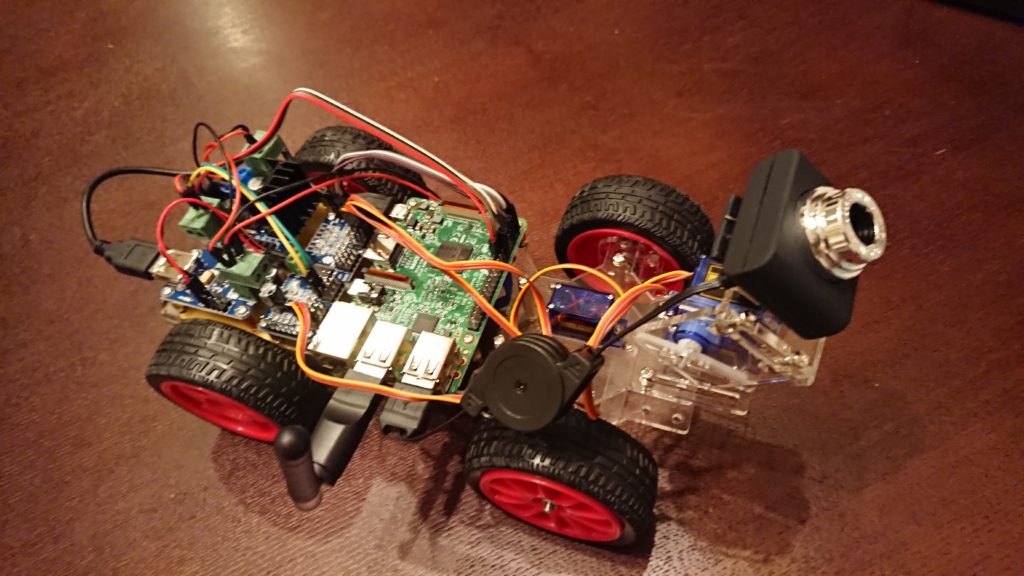
カメラを先端に設置。
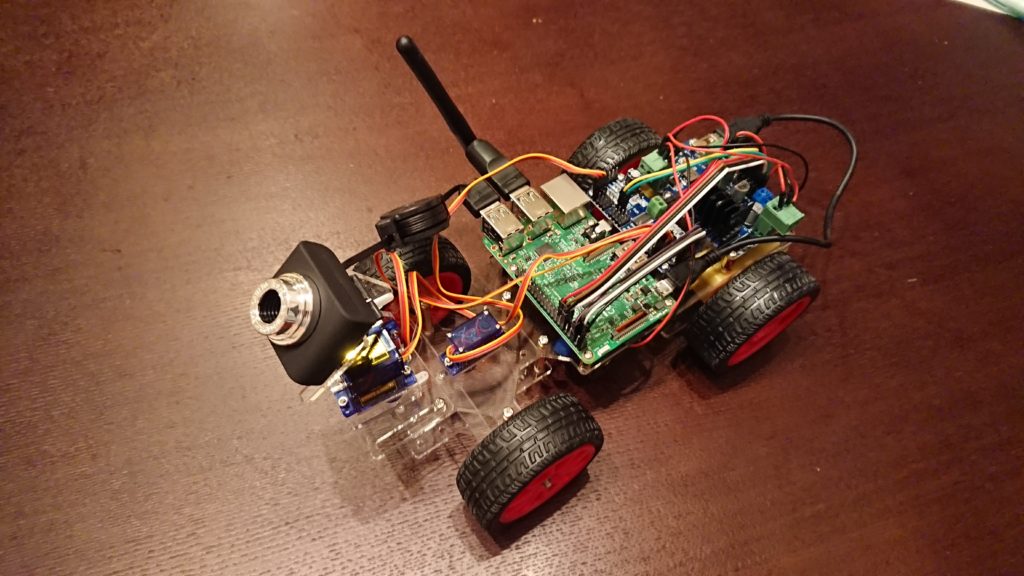
完成!!