前回の続きです。
[SunFounder]SunFounder Model Car kit Video Camera for Raspberry Pi 3/2/B /B RC Servo Motor Remote Control Roboticsをベースに自律型の自動運転ラジコンカーを自作しています。
→材料に関してはこちらをご覧ください。
今回は基板・配線を設置します。
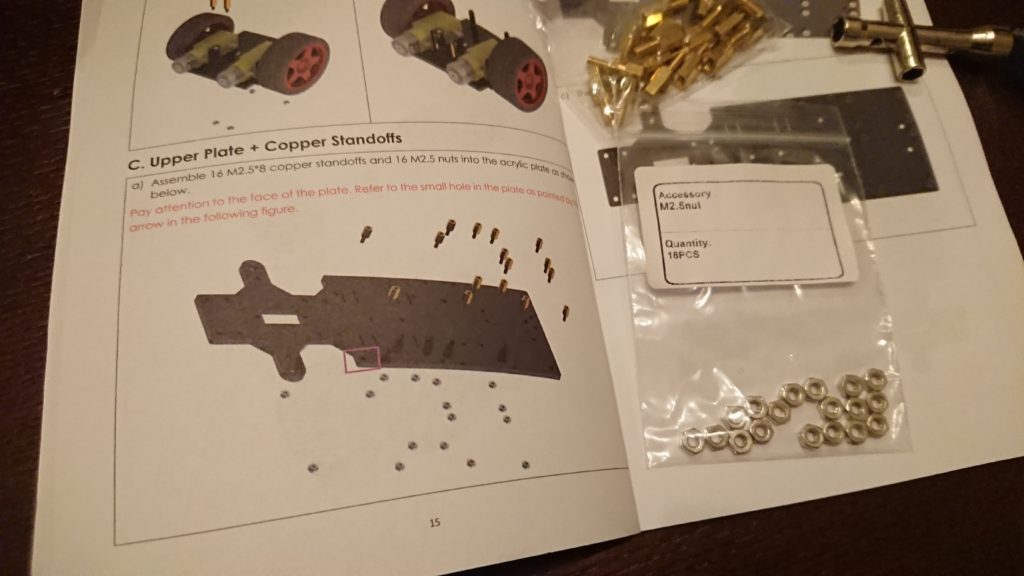
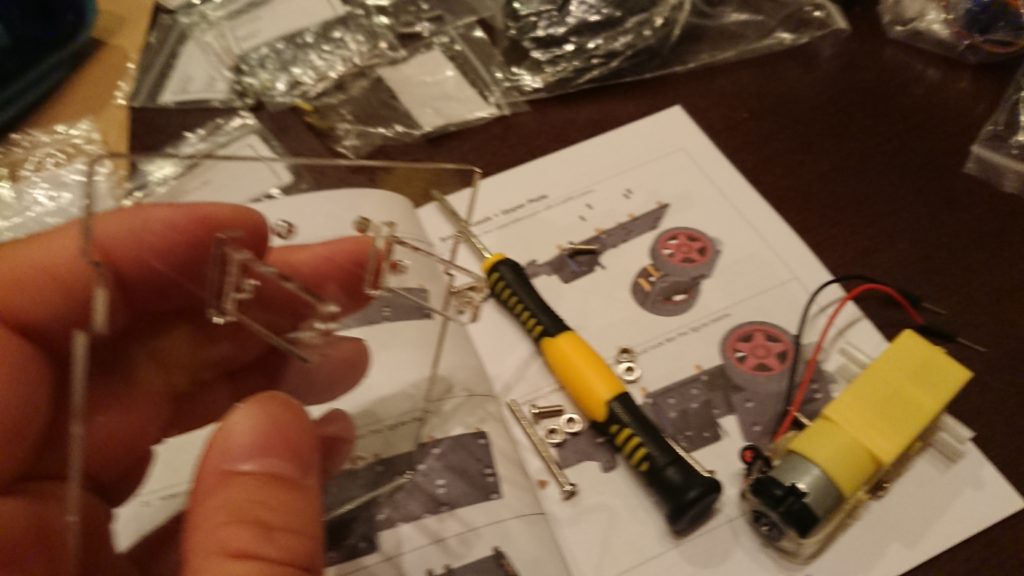
まずは前輪設置部のシャーシを組み立てます。それにしてもすごい真鍮スタンドオフスペーサーの数!!

付属のクロスソケットレンチとドライバーで、一つずつ丁寧に締めていきます。
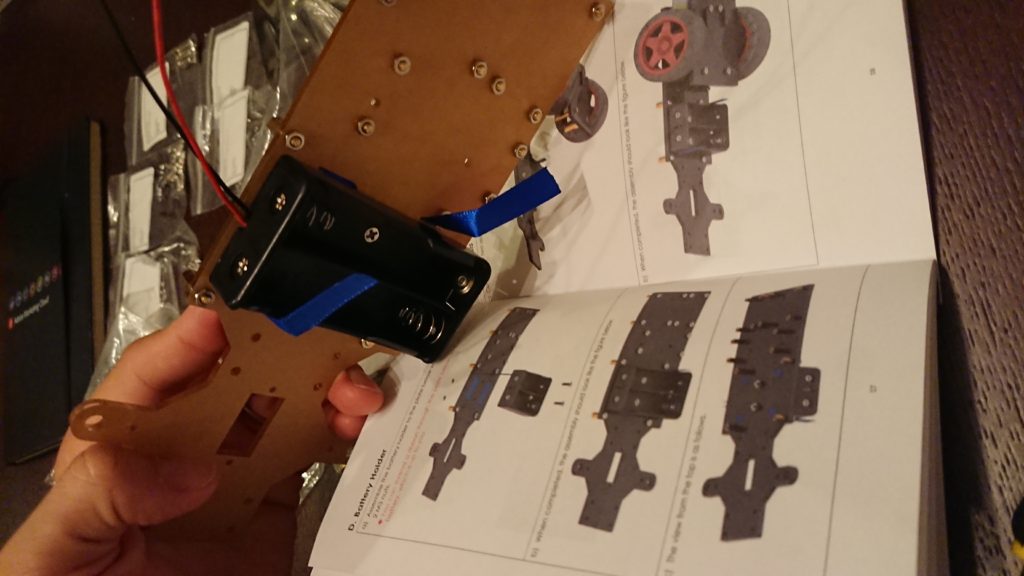
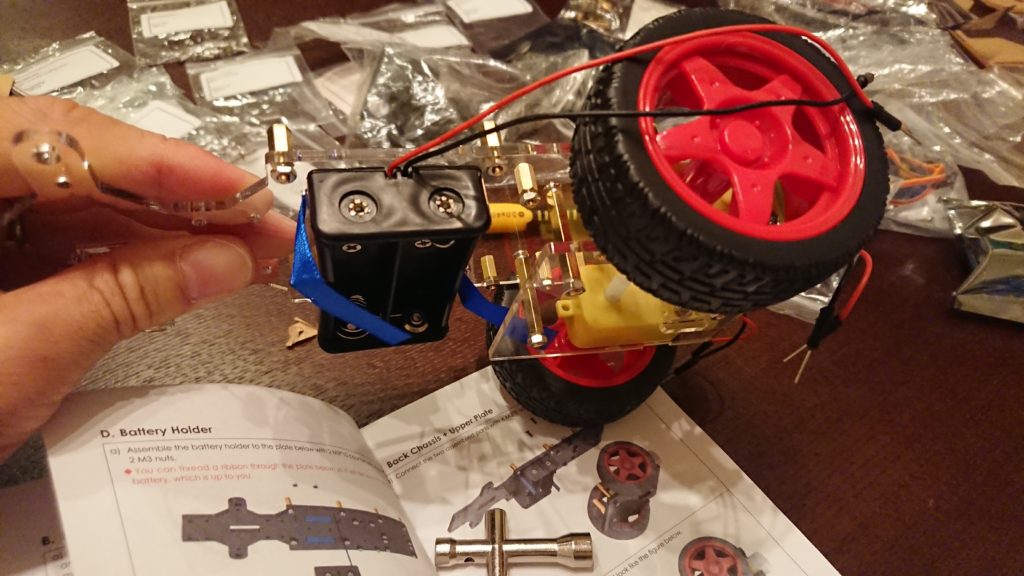
電池ホルダーを設置します。青いリボン(電池を外しやすくするのが目的?)の付け方が、説明書の記載だけだとよく分からない(^_^;)
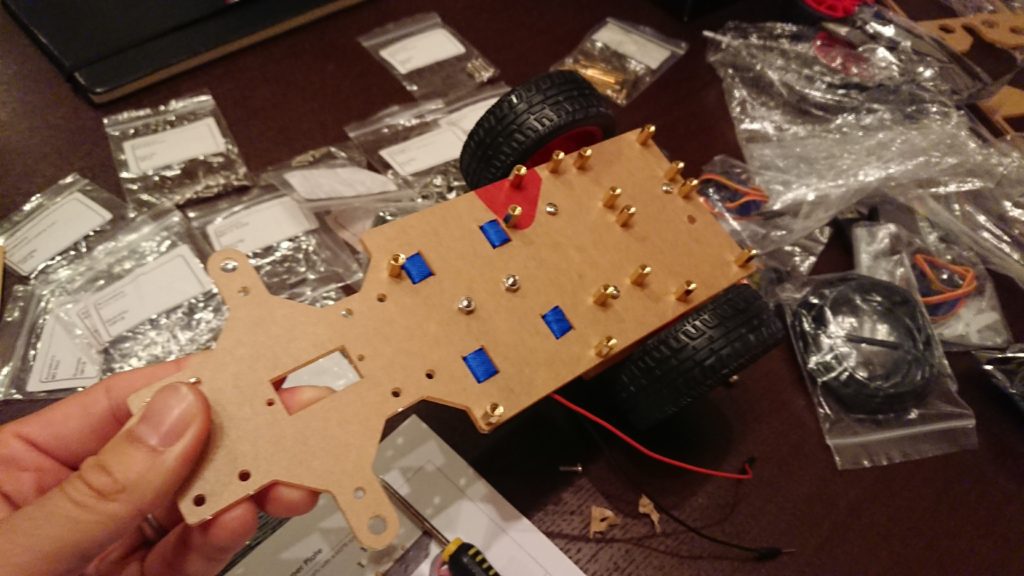
真鍮スタンドオフスペーサー、設置完了!!あ~指が疲れた。。。
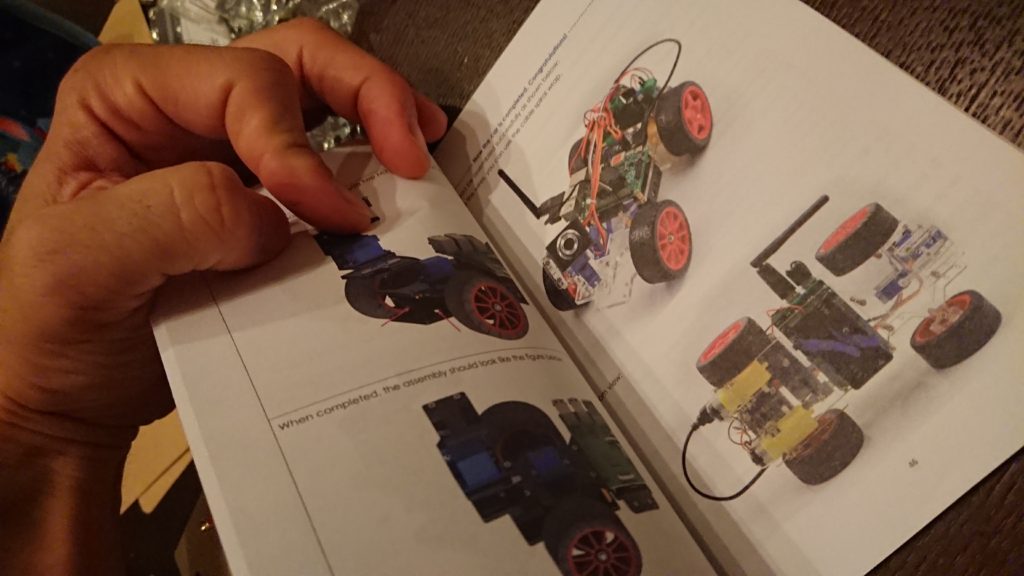
最終的な完成姿をチラ見してモチベーションをアゲていきましょう!!
……ん?!説明書の写真では、シャーシ等が透明になってる?!
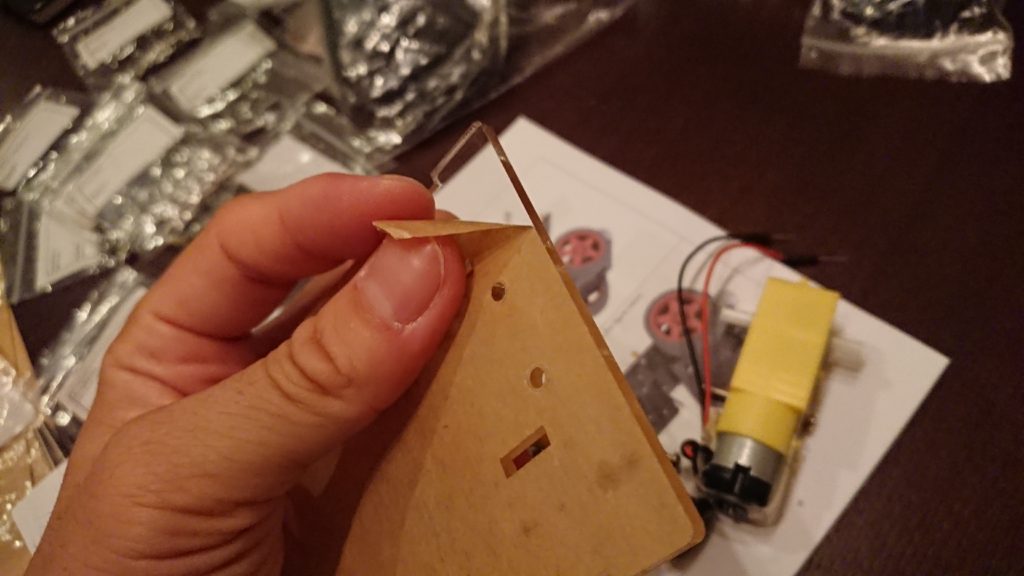
あれっ?!剥がれる……もしかして保護用シール?
……ってことでやり直し(+_+)

ハァ~( ´Д`)

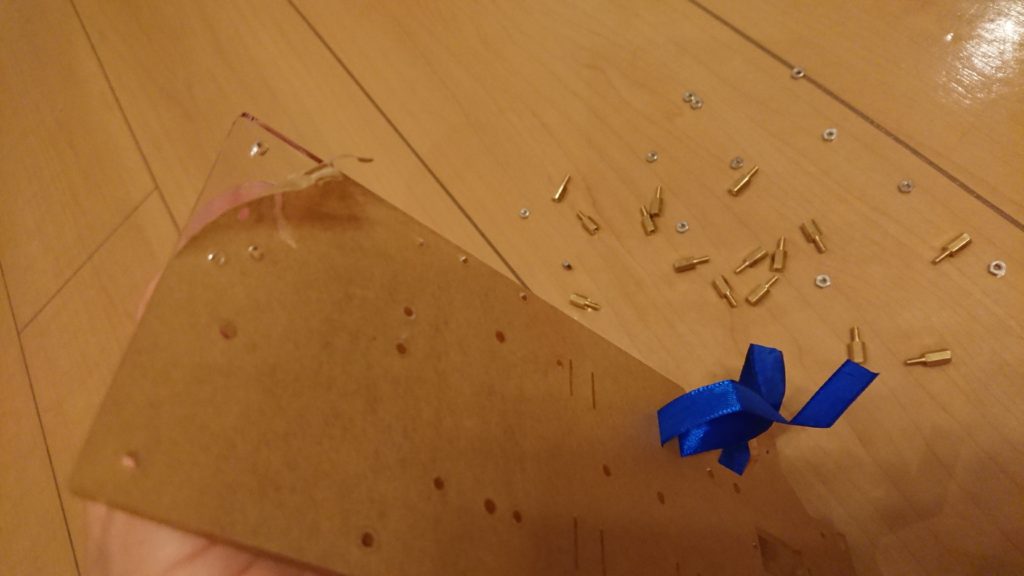
透明。これが正解。
他の部品も全て一からやり直し。振り出し(後輪設置)に戻る。
透明ボディーだと、青色リボンが目立つなぁ(笑)
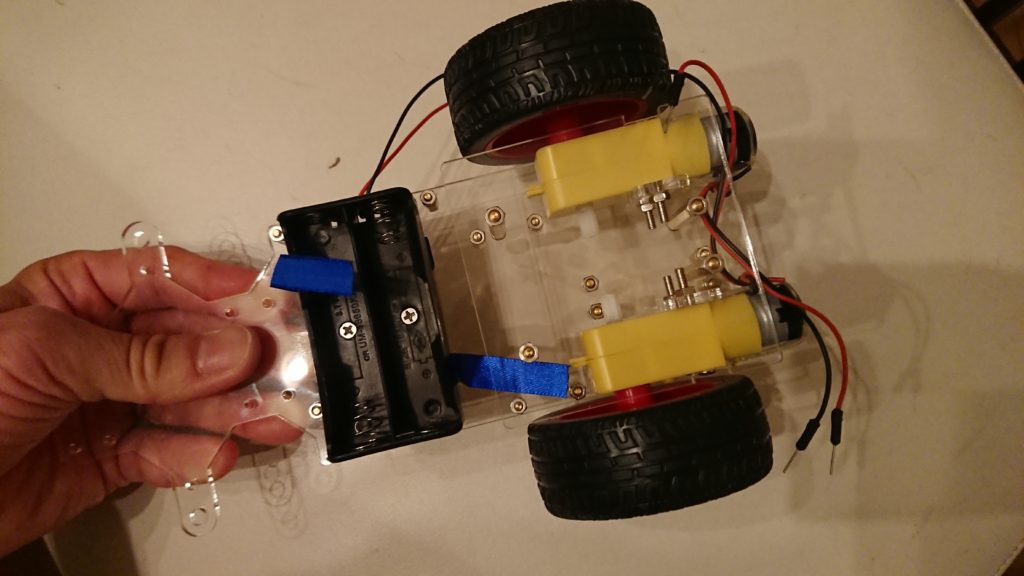
今度こそ後輪設置まで完了!!次に電子基板を取り付けます。
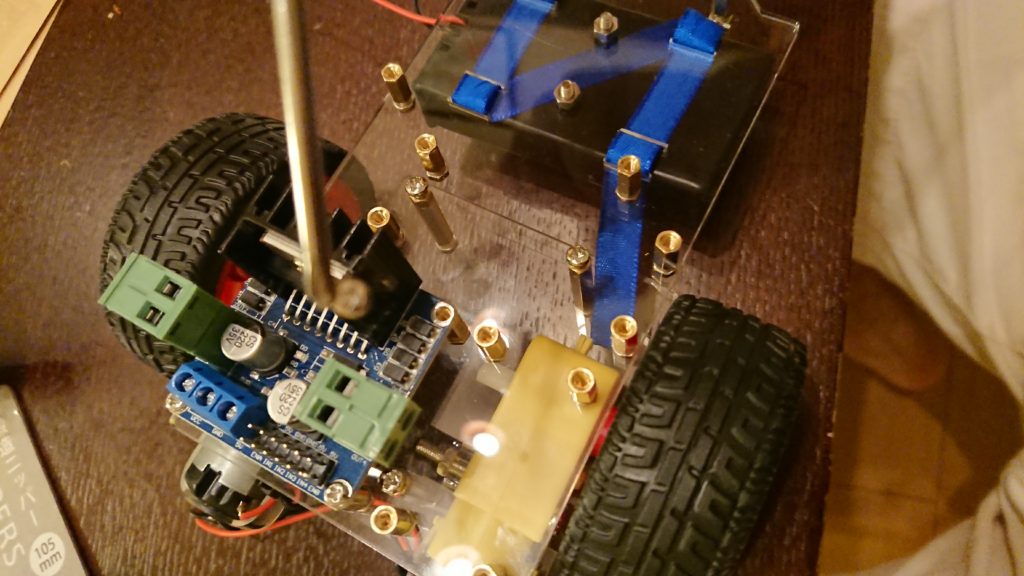
まずはL298N DC motor driver(後輪用モーターを制御)を設置します。
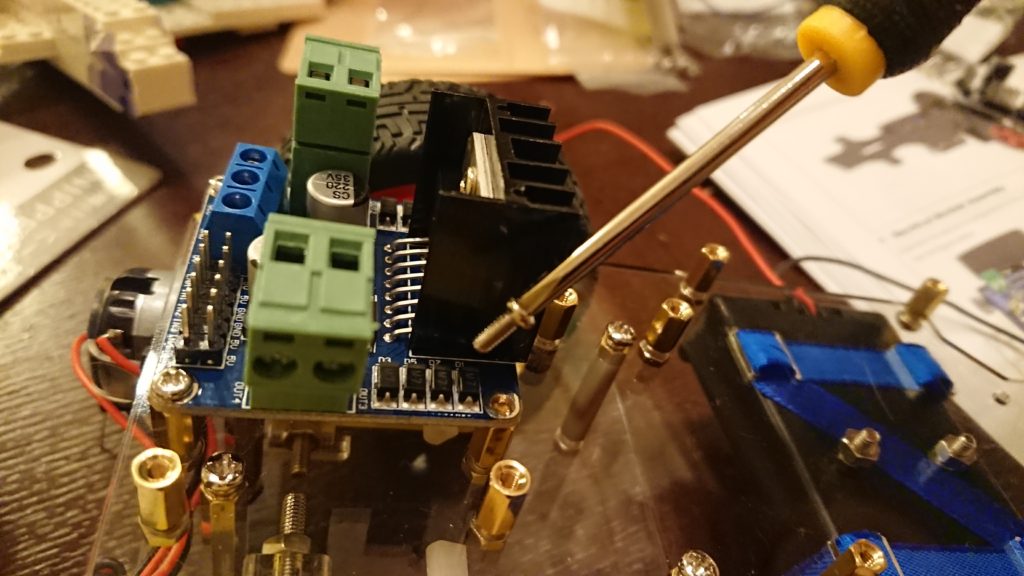
細かい作業なので手元の動きが慎重になります。
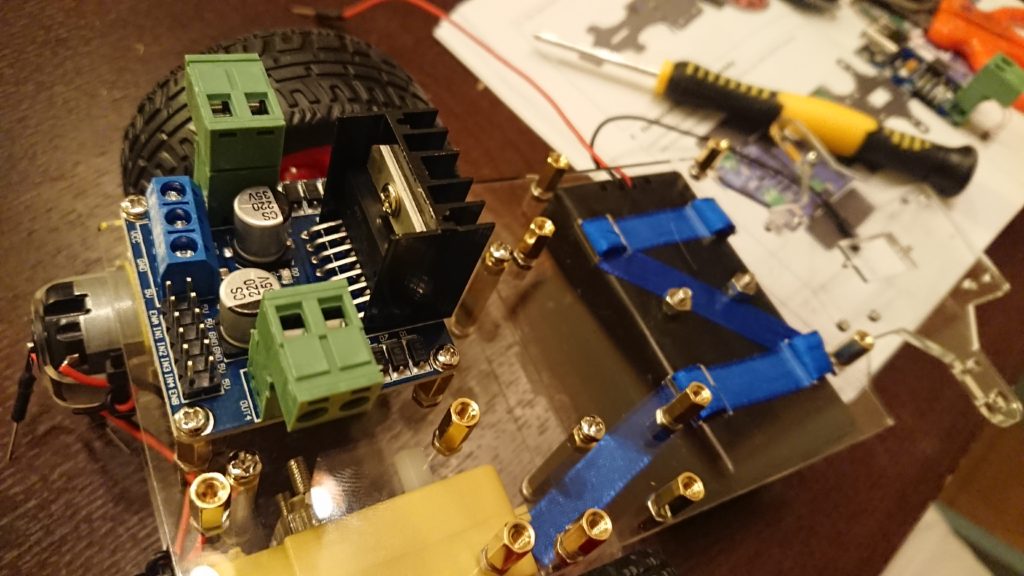
こんな感じで設置完了!
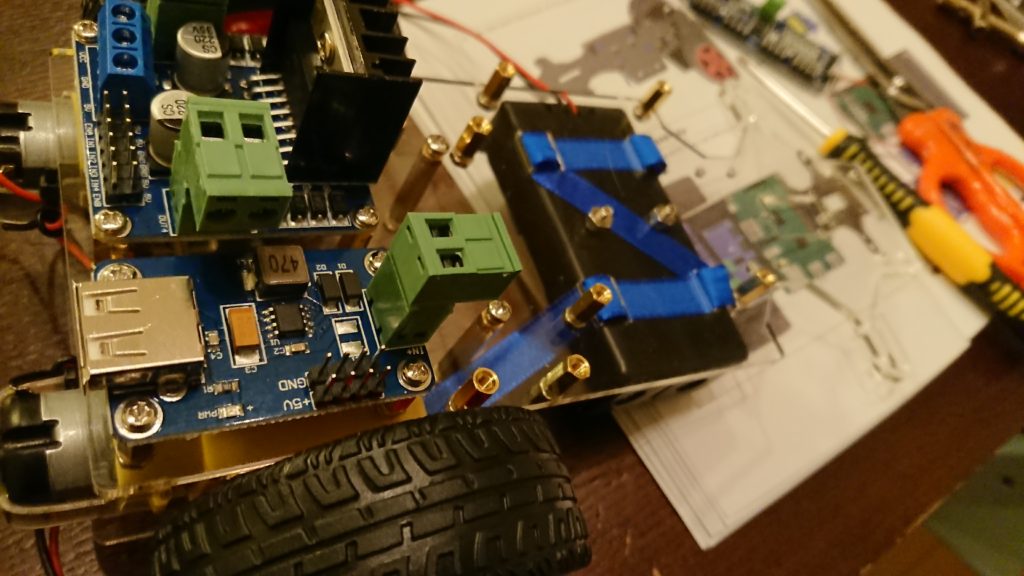
次にStep-down DC-converter module(電池からエネルギーを受領)を設置します。
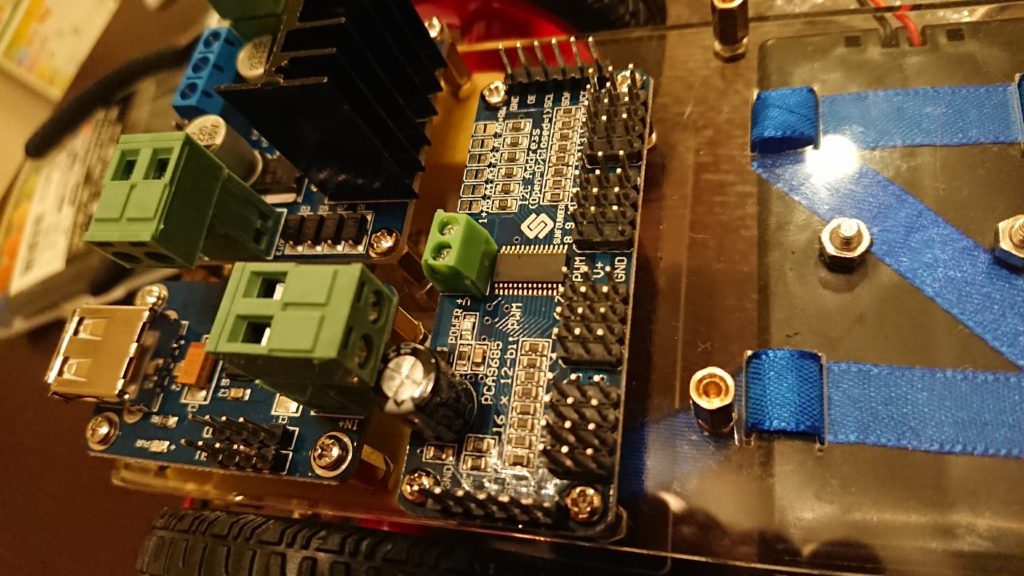
16-Channel 12-bit PWM driver (Servo Controller) (LED等をコントロール)を設置します。
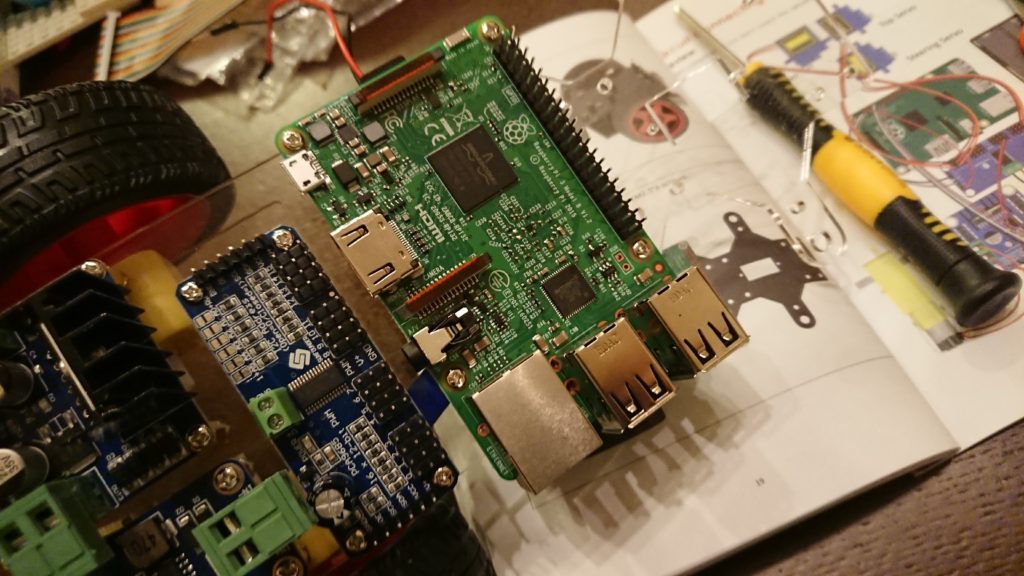
そしていよいよコントローラーの役割を担うRaspberry Pi3を設置します。
Raspberry Pi3自体のインストール方法は、別記事で後日ご紹介します。

モーターとL298N DC motor driverをケーブルで接続します。
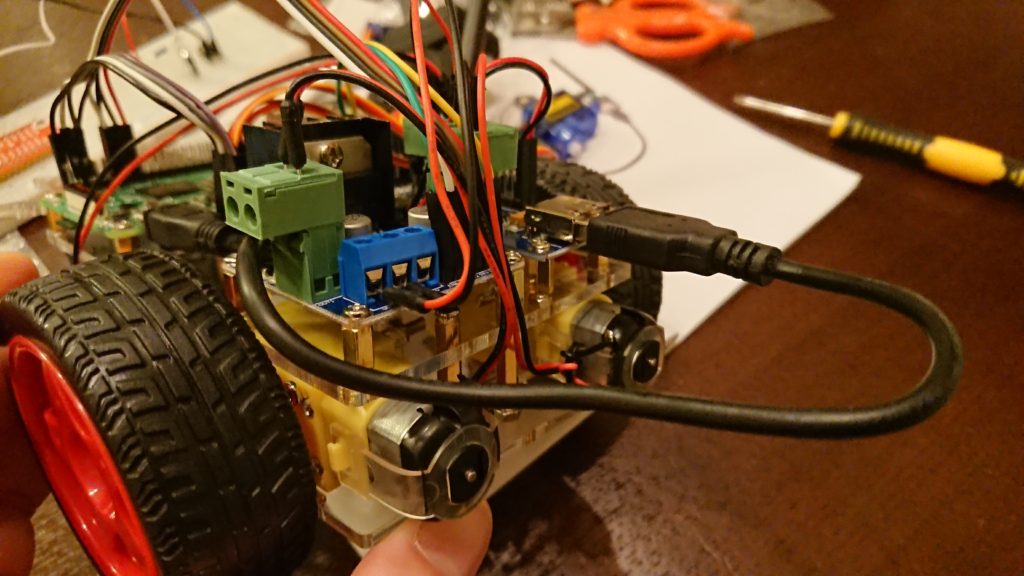
Step-down DC-converter moduleをRaspberry Pi3に繋げます。
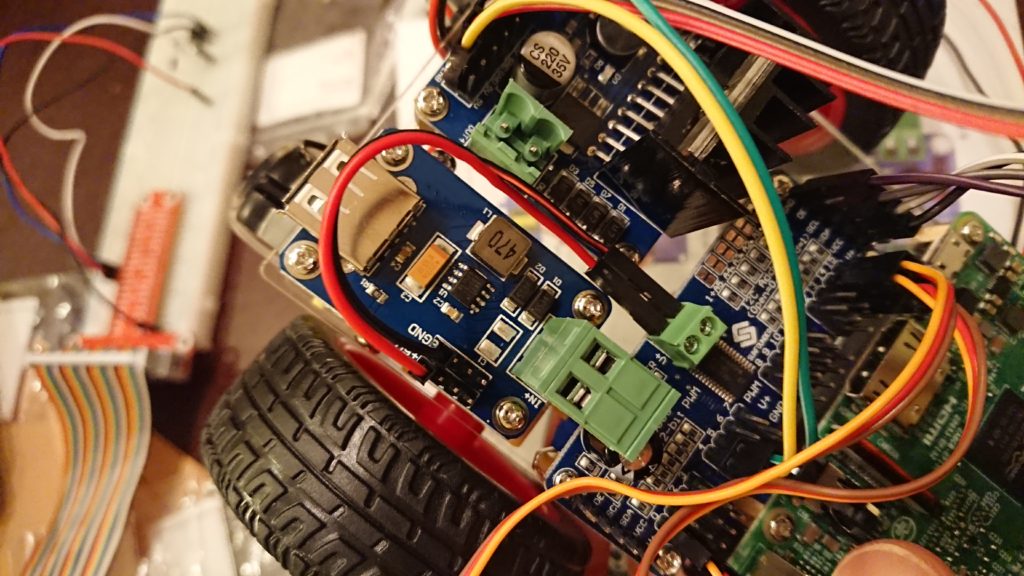
もう一つ、Step-down DC-converter moduleを、今度は16-Channel 12-bit PWM driver (Servo Controller)に繋げます。
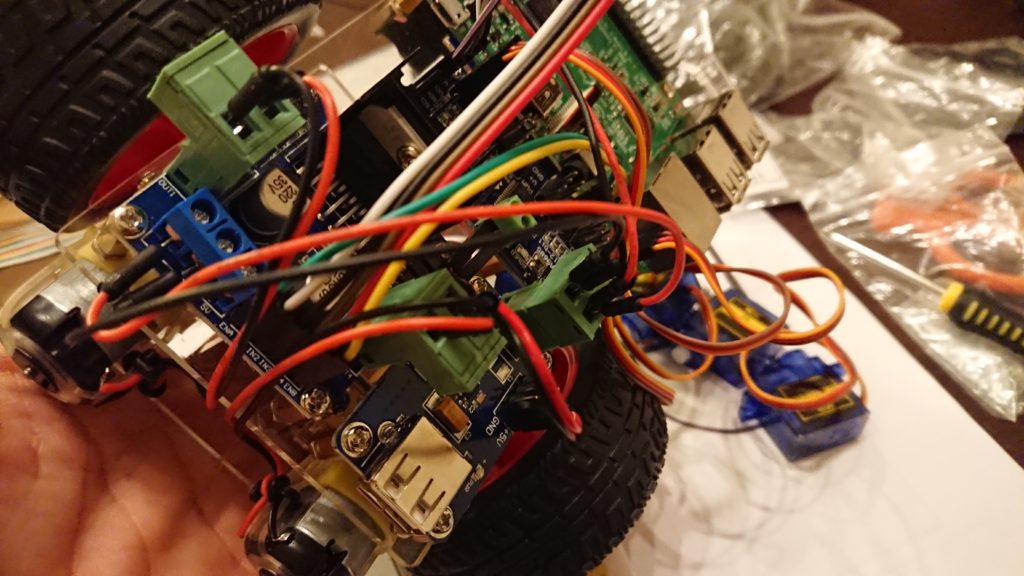
L298N DC motor driverとRaspberry Pie、16-Channel 12-bit PWM driver (Servo Controller)を繋げます。
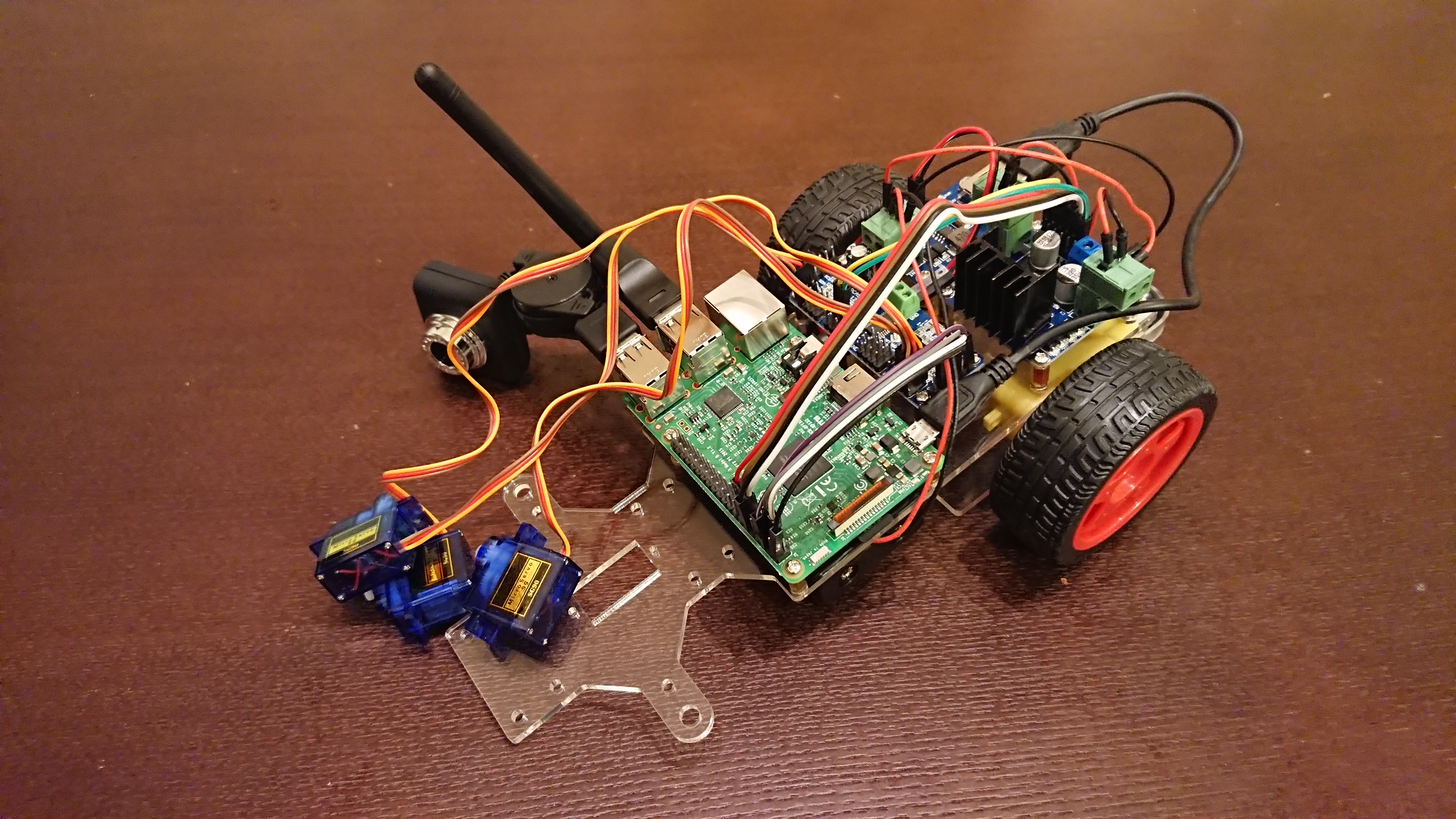
そして、Tower Pro Micro Servo SG90(回転の回数や回転角度などを指定し制御できる特殊なモータ:上記写真の右奥にある水色のもの)を、3つともケーブルで16-Channel 12-bit PWM driver (Servo Controller)に繋げます。
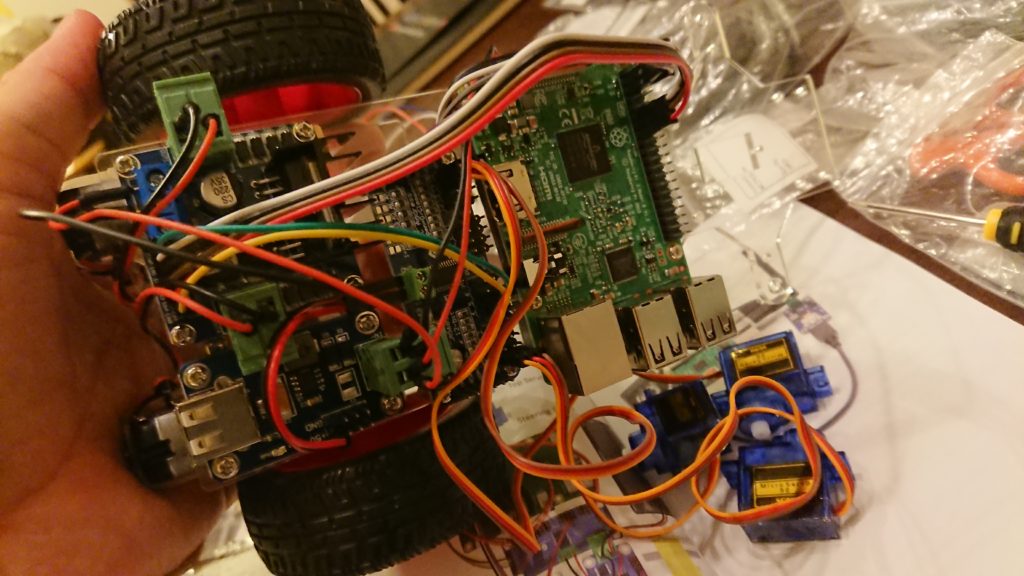
配線完了。全体はこんな感じ。

次に、USB cameraやUSB Wi-Fi adapterを、先ほど作った基板に接続します。
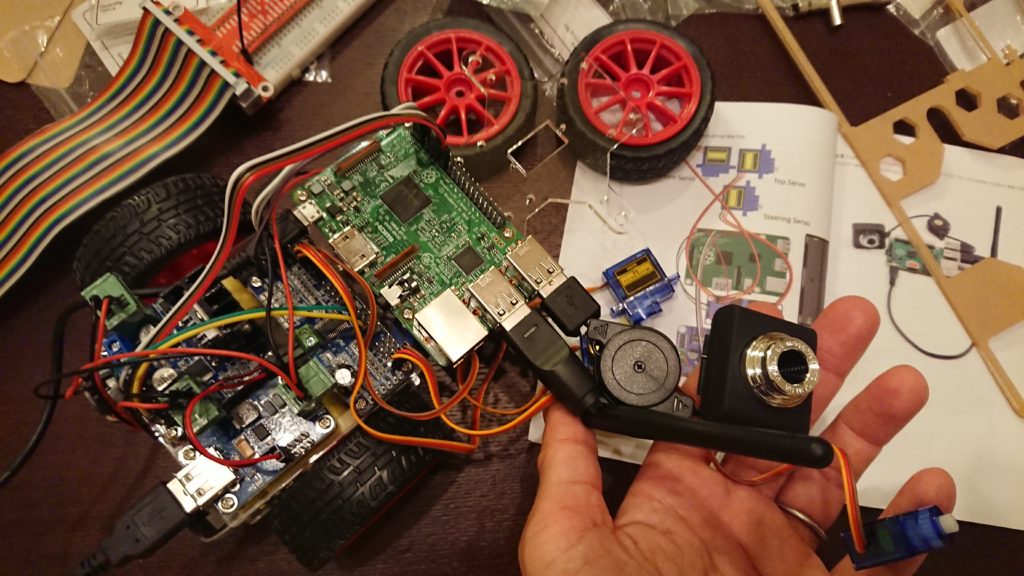
USB端子にUSBを付けるだけ。とても簡単。
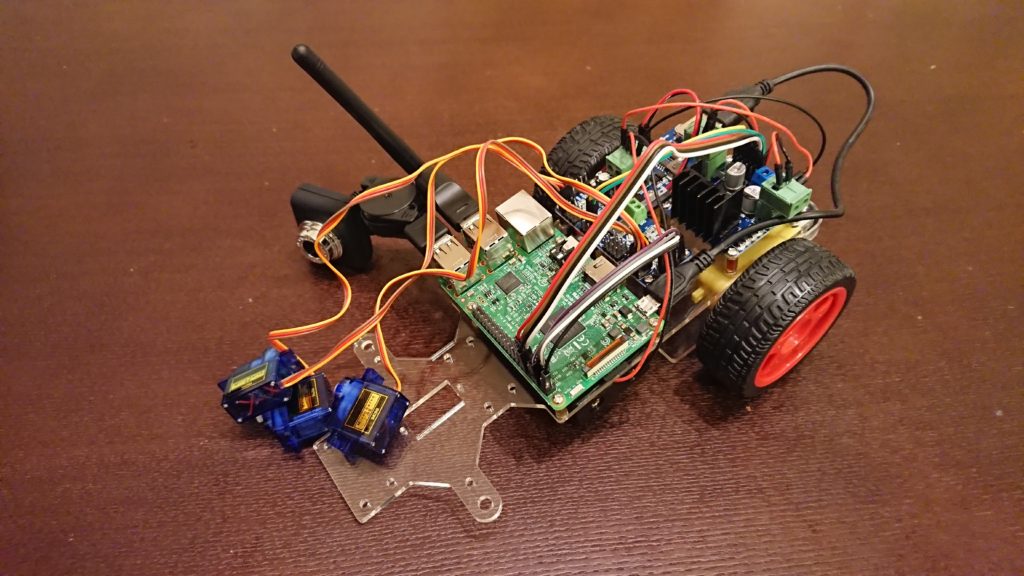
ここまでできました!